week10~14 <<
Previous Next >> week18影片
week15~18
week15
簡介自己倉儲
week16
solvespace導入webot
solvespace導入vrep
week17
繪製solvespace 各個零件檔1.桿子2.車體3.輪子
導入檔案至VREP(以下檔案)
https://github.com/mdecourse/cad2019/tree/master/downloads/solvespace/curiosity/
以下為17周任務影片(有字幕)
翻譯資料: http://www.coppeliarobotics.com/helpFiles/en/buildingAModelTutorial.htm
This tutorial will guide you step-by-step into building a clean simulation model, of a robot, or any other item.
本教程將指導您逐步構建機器人或任何其他項目的清晰仿真模型。
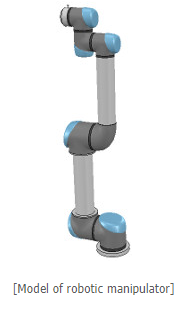
To illustrate the model building process, we will be building following manipulator:
為了說明模型的構建過程,我們將構建以下操縱器:
Building the visible shapes
When building a new model, first, we handle only the visual aspect of it: the dynamic aspect (its undelying even more simplified/optimized model), joints, sensors, etc. will be handled at a later stage.
建立可見的形狀
在構建新模型時,首先,我們僅處理它的視覺方面:動態方面(其簡化,優化模型的不合理之處),關節,傳感器等將在以後階段進行處理。
Primitive shapes will be simple meshes, which might not contain enough details or geometric accuracy for our application. Our other option in that case would be to import a mesh from an external application. importing CAD data from an external application.
基本形狀將是簡單的網格,對於我們的應用程序,可能沒有足夠的細節或幾何精度。 在這種情況下,我們的另一個選擇是從外部應用程序導入網格。從外部應用程序導入CAD數據。
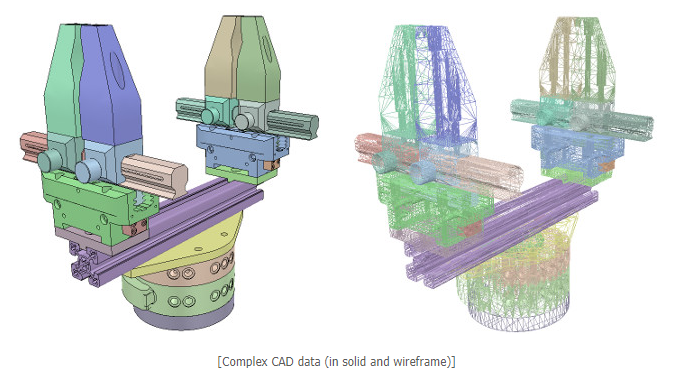
Above CAD data is very heavy: it contains many triangles (more than 47'000)。 In that case, a simulation scene can quickly become too slow.Generally, we recommend to model a robot with no more than a total of 20'000 triangles, but most of the time 5'000-10'000 triangles would just do fine as well. Remember: less is better, in almost every aspect.
上面的CAD數據非常重:它包含許多三角形(超過47'000個)。。 在這種情況下,模擬場景可能很快變得太慢。通常,我們建議對不超過2萬個三角形的機器人進行建模,但是在大多數情況下,5 000至10 000個三角形也可以。 記住:在幾乎所有方面,少即是好。
So, if possible, try to remove all the holes, screws, the inside of objects, etc. from your original model data. If you have the original model data represented as parametric surfaces/objects, then it is most of the time a simple matter of selecting the items and deleting them
因此,如果可能,請嘗試從原始模型數據中刪除所有的孔,螺釘,物體的內部等。如果您將原始模型數據表示為參數化曲面/對象,則通常在大多數情況下只需選擇並刪除它們即可
You can notice that the whole robot was imported as a single mesh. We will see later how to divide it appropriately. Notice also the wrong orientation of the imported mesh: best is to keep the orientation as it is
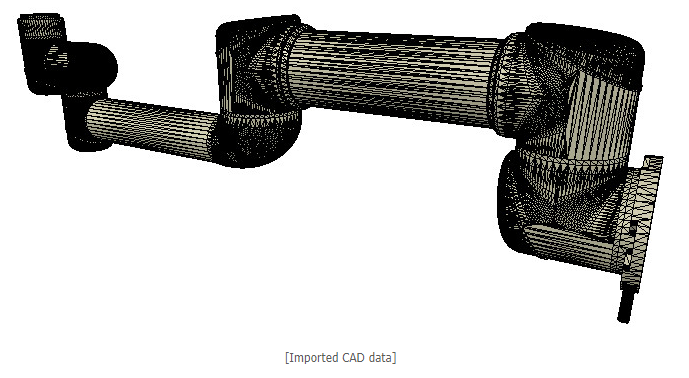
您會注意到整個機器人是作為單個網格導入的。稍後我們將看到如何對其進行適當劃分。還要注意導入的網格的方向錯誤:最好保持其方向不變,直到構建整個模型為止
At this stage, we have several functions at our disposal, to simplify the mesh:
1.Automatic mesh division
2.Extract the convex hull
3.Decimate the mesh:
在此階段,我們可以使用多種功能來簡化網格:
1.自動網格劃分2.提取凸包3.刪除網格的內部
week18
期末報告
week10~14 <<
Previous Next >> week18影片